 Ett fartyg kör just nu förutbestämda rutter runt om i Västsverige under olika väder- och ljusförhållanden samtidigt som det spelar in sensordata. Det är ett forskningsprojekt på Chalmers som skapar vad det beskriver som världens största öppna dataset för utveckling av självkörande farkoster.
Ett fartyg kör just nu förutbestämda rutter runt om i Västsverige under olika väder- och ljusförhållanden samtidigt som det spelar in sensordata. Det är ett forskningsprojekt på Chalmers som skapar vad det beskriver som världens största öppna dataset för utveckling av självkörande farkoster.
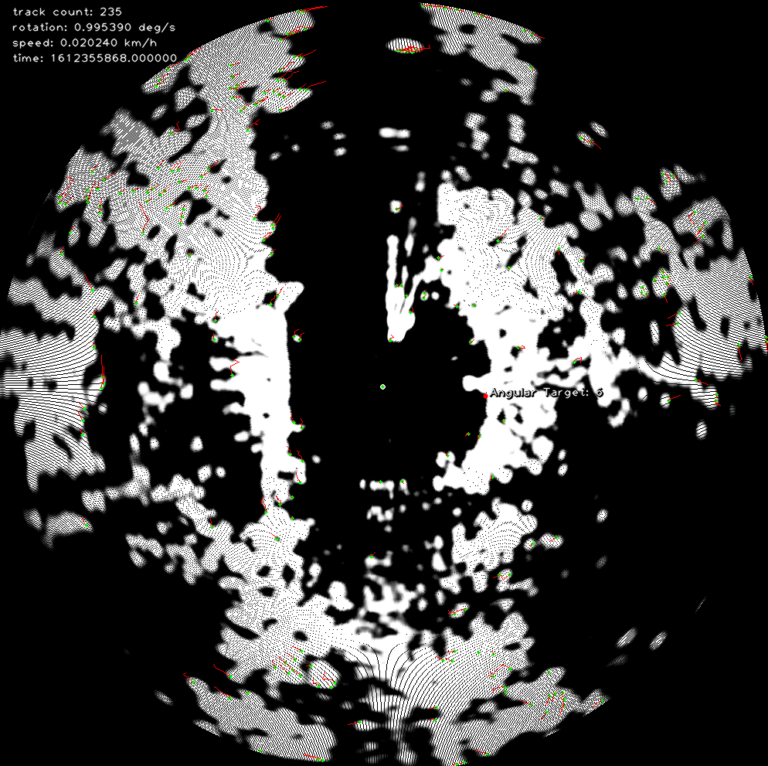 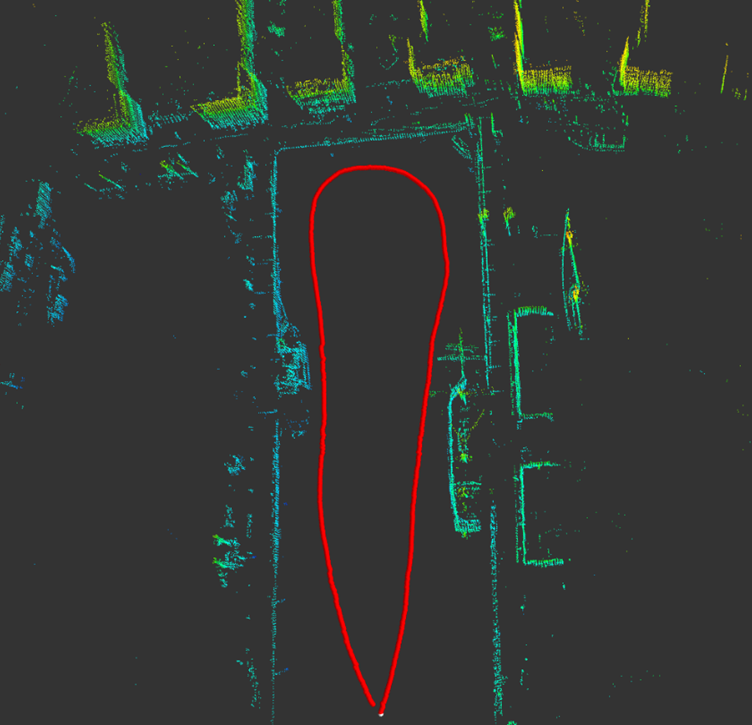  |
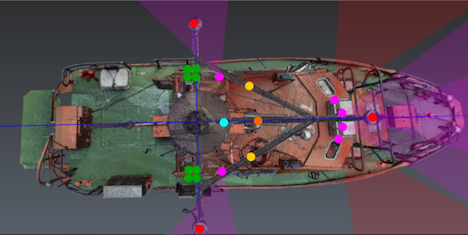
| Skeppet är utrustat med Flir- och Axis-kameror, Velodyne-lidar, Simrad-radar, IMU, GNSS och vädersensor. |
Sensorinspelningarna sparas i ett dataset som heter Reeds. Det är det första marina datasetet av sitt slag.
Inspelningarna används för att utveckla artificiell perception och självkörningsalgoritmer.
Forskare kan tanka upp sina algoritmer i en molntjänst och automatiskt få dem utvärderade mot Reeds. Resultaten från jämförelsen publiceras i öppna listor, där även allmänheten kan se vilka forskare världen över som har tagit fram de bästa metoderna.
Forskare har hittills använt inspelningarna i följande projekt:
- konstruera automatisk igenkänning och klassificering av andra fartyg
- mät det egna fartygets rörelser utifrån kamera
- 3D-modellera omgivningen
- AI-baserad borttagning av vattendroppar från kameralinser.
Kamerorna genererar 6 gigabyte bilddata per sekund vilket summerar sig till 16 terabyte under en tur på 1,5 timmar. Det är mycket mer än vad som hittills presenterats i liknande dataset.
Marina data är extra intressanta, enligt projektet, eftersom rörelser relaterar till omgivningen på ett mer komplext sätt än fordon på land.
Reeds är fritt tillgängligt för akademi och industri världen över. Datainsamlingen kommer att fortsätta i ytterligare tre år.
Projektledare är Ola Benderius, docent på avdelningen för fordonsteknik och autonoma system på institutionen för mekanik och maritima vetenskaper.
Projektet startade år 2020 och drivs av Chalmers i samarbete med Göteborgs Universitet, Rise och Sjöfartsverket. Trafikverket finansierar projektet.