Zenuity må vara ungt men har fått en flygande start i och med att Autoliv och Volvo lyfte över personal och kunnande inom mjukvara för förarassistans och självkörning. I praktiken innebar det att företaget redan från dag ett hade runt 300 utvecklare på kontor i Göteborg, München och Detroit.
Zenuity må vara ungt men har fått en flygande start i och med att Autoliv och Volvo lyfte över personal och kunnande inom mjukvara för förarassistans och självkörning. I praktiken innebar det att företaget redan från dag ett hade runt 300 utvecklare på kontor i Göteborg, München och Detroit.
Zenuity |
| Startade: 18 april 2017. Antal anställda: 550. Kontor: Göteborg, Linköping, München, Detroit. Namnet: är en ordlek baserat på zenit och ingenuity. Det kan översättas med höjden av klurighet. Ägare: Autoliv och Volvo äger hälften var. Arvet: Autoliv har satsat cirka 1,1 miljarder kronor, merparten i pengar. Även immateriella rättigheter, kunnande och personal räknas in i summan. Volvo Cars har bidragit med immateriella rättigheter, kunnande och personal. |
– Det finns inget överlapp med Autoliv och Volvo, de gör inte samma saker som vi, säger Mohammad Ali som är produktansvarig på Zenuity.
Dagens ADAS-funktioner klarar bland annat av att hålla kvar bilen i filen så länge det finns tydliga vägmarkeringar. Dessutom ökar motståndet i ratten om föraren avsiktligt styr mot kanten av filen.
Slår man på blinkern kan bilen byta fil på egen hand. Först försäkrar den sig dock om att det inte kommer någon i omkörningsfilen. I så fall väntar den tills det är fritt bakåt.
Uppgiften att byta fil och köra om på en motorväg kan tyckas enkel men i dagens implementationer upplever man som förare att den egna bilen ligger onödigt nära under omkörningen trots att bilen befinner sig mitt i filen. Vi människor lägger oss automatiskt lite till vänster för att öka marginalen till det fordon som körs om.
– Det är en klassiker. Vi har därför lagt till en funktionalitet som offsettar till vänster om det inte finns mötande.
Ofta används SAE-skalan när man diskuterar förarstöd och självkörning. På nivå ett och två har föraren fullt ansvar medan bilen tagit över på nivå fyra och fem.
– Vi tycker inte att SAE-skalan säger tillräckligt mycket, den talar bara om vilket ansvar föraren har men inte vilka användarfall bilen klarar av, säger Mohammad Ali.
Dessutom uppfattas mellannivån SAE-3 ofta som luddig i och med att föraren både ska kunna göra annat, som att surfa på mobilen, samtidigt som hen ska vara beredd att snabbt ta över ansvaret för körningen.
Zenuity har ambitionen att släppa programvara för fullt självkörande bilar framåt år 2030. På vägen dit finns fyra fristående funktioner – tillika kommersiella produkter – som kommer att lanseras successivt. Redan nästa år släpps lite mer avancerade förarstödsfunktioner, även kallat ADAS (Advanced driver assistance systems). Det handlar exempelvis om kartor som byggts upp med data om väglag och trafikhinder som samlats in från andra uppkopplade fordon som rullat på vägarna.
En annan förbättrad förarassistansfunktion är filhållning som inte kräver att det finns vägmarkeringar.
Alla dessa funktioner fungerar i farter upp till 130 km/h och kräver att föraren är uppmärksam. Det finns olika metoder för att försäkra sig om det senare, från kameror som kontrollerar att föraren tittar på vägen till sensorer i ratten som känner av händerna.
Om ungefär två år, 2020, kommer Traffic Jam Pilot, Zenuitys första produkt som låter föraren ägna sig åt annat än att köra bilen.
 – Det blir första funktionen som erbjuder tid.
– Det blir första funktionen som erbjuder tid.
Den fungerar på motorvägar som tyska Autobahn där bland annat olyckor och vägarbeten leder till långa köer som rör sig framåt i krypfart. Villkoren är strikta. Farten får inte överstiga 60 km/h och den maximala skillnaden till andra fordon får inte vara mer än 30 km/h. Dessutom ska bilen vara ”boxed-in”, det måste finnas en barriär till mötande trafik, det ska vara bilar framför och bakom plus att korsningarna ska vara planskilda.
Förutom att funktionen bara kommer att fungera på vissa väl kartlagda vägsträckor måste bilen också klara av att lämna tillbaka kontrollen på ett lämpligt sätt när kön löser upp sig och farten ökar. Här går det inte att kräva att föraren blixtsnabbt ska ta över ansvaret, uppmaningen måste komma i god tid och dessutom måste bilen ha en reservplan för vad den ska göra om föraren inte tar över, då måste den kunna stanna.
Nästa funktion kommer ett år senare, 2021, och kallas Highway Pilot. Den kan köra bilen på en motorväg i hastigheter upp till cirka 70 km/h även om det långsiktiga målet är att den ska fungera upp till 130 km/h. Highway Pilot kan hantera lite krångligare trafik jämfört med Traffic Jam Pilot och dessutom byta fil på egen hand.
Fortfarande gäller att den bara kommer att fungera på vissa väl kartlagda motorvägar med planskilda korsningar. Ett annat bivillkor är att det inte får finns fotgängare på motorvägen, då går det inte att aktivera systemet.
Precis som med Traffic Jam skannar bilen hela tiden omgivningen och kontrollerar exempelvis att det finns en barriär till mötande trafik liksom vilka fordon som finns runt omkring.
Highway Pilot motsvarar det som Volvo kallar Drive Me och som bland annat ska testas på infarterna till Göteborg.
För alla självkörande funktioner gäller att det inte får finnas någon tvekan om vem det är som kör.
– Det krävs ett tydligt gränssnitt. Volvo har exempelvis valt att ha två paddlar på ratten, säger Mohammad Ali.
För att undvika missförstånd ändras dessutom utseendet på förarens skärm radikalt när man trycker på paddlarna.
En annan skillnad jämfört med ADAS-funktioner är att den automatiska körningen inte kopplas ur om man exempelvis trampar på bromsen. Istället får man ett meddelande om att det är bilen som ansvarar för körningen. Släpper man då upp bromsen ökar den farten igen och bilen fortsätter på egen hand. För att återta körningen måste föraren göra ett aktivt val, som att trycka på bägge paddlarna.
År 2023 är det dags för en tjänst som Zenuity döpt till Valet Parking där bilen kan parkera på egen hand. Det finns dock några villkor: området är begränsat, ingen behöver vara i bilen och farterna är under 20 km/h. Dock kan det finnas människor på parkeringen. Risken för att någon ska dödas vid en påkörning är så pass låg att den ligger inom rimliga gränser.
– Det är jättesvårt att visa att en bil är hundraprocentigt säker. Det handlar om att ha ett bra säkerhetskoncept där man kan argumentera för säkerheten och göra verifieringar av systemet.
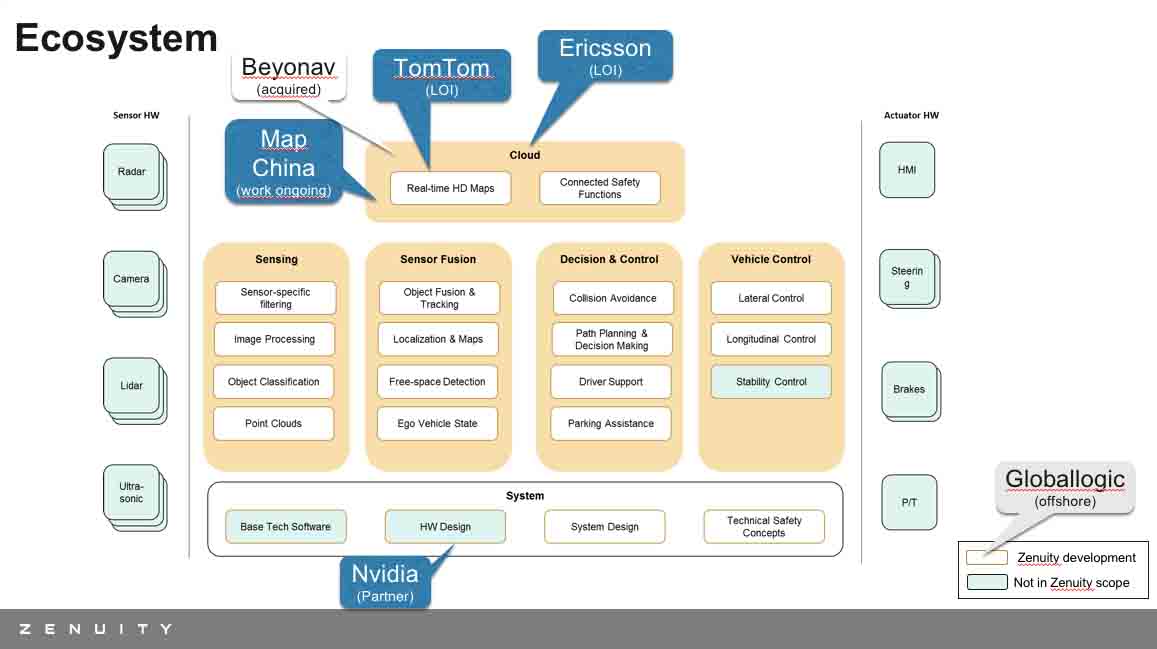
Grundprincipen är lite oväntat att bilen inte nödvändigtvis behöver se alla objekt, det handlar istället om att den sammanvägda informationen från sensorerna, sensor fusion, aldrig får leda till att bilen tror att den ser längre eller bättre än den verkligen gör.
Det finns fyra nivåer i beslutsfattandet från sensorerna och sammanvägda sensordata via beslut till styrning av bilen.
Testningen av systemet baseras på en kombination av simuleringar och verklig körning. En del i det arbetet är att samla in data från verkliga miljöer och på så sätt bygga upp ett bibliotek med olika testfall som sedan kan användas i simuleringar.
– Det enda man sen behöver bevisa är att systemet aldrig överskattar sin förmåga och anpassar körningen därefter, säger Mohammad Ali.
Ta som exempel vägen som bilen åker på. Sensorerna kan dels leverera vad de anser är körbar yta men också ett betydligt mindre område som de är säkra på är körbar yta. Motsvarande resonemang gäller för objekt som andra bilar, fotgängare och cyklister.
–Systemet ser till att körningen planeras inom begränsningarna, där det finns väg och inga objekt.
Dessutom måste bilen kunna stanna inom det säkra området. Ser sensorerna bara 50 meter framåt måste bilen kunna stanna på den sträckan.
De flesta människor tar medvetet eller omedvetet större risker. Körning i stadsmiljö skulle annars i princip vara omöjligt eftersom ingen hinner stanna om det springer ut ett barn framför en bil som står parkerad längs med gatan.
Hur en självkörande bil ska hantera den här typen av problem är inte självklart. Med strikta krav på att bilen ska hinna stanna blir det bara krypfart längs parkerade bilar. Eller så får föraren ta över ansvaret.
– Man får göra någon sorts statistisk utvärdering så att sannolikheten är mindre än en på miljarden. Dessutom behöver man kunna underbygga påståendet.
Systemen måste också konstruera för att klara en EMC-puls som slår ut elektroniken, det måste finnas ett reservsystem som kan ta över och få stopp på färden på ett säkert sätt.
För att kunna garantera säkerheten behövs redundans. Det duger dock inte att ha exempelvis dubbla kameror eftersom de har samma felmoder.
– Lidar är väldigt viktig för redundansen, för att man ska kunna lova att inte köra på någon.
Värt att notera är att kravet på redundans varierar med riktning och avstånd. På långt håll är kravet lågt så länge bilen hinner stanna innan den kommer fram till objektet. Närmare bilen är det mycket högre. Det gäller även bakåt för att det ska vara möjligt för bilen att byta fil på ett säkert sätt.
Dessutom måste systemet kontinuerligt verifiera att alla delar fungerar.
Zenuity har egna experter på lidar, radar och kameror för att kunna kravspecifikationer.
– Det är en del av produkten.
Däremot går det inte att driva sensorutvecklingen, man får göra det bästa av det som finns på marknaden.
Att lidar är en dyr komponent har inte så stor betydelse i dagsläget.
– Man underskattar att det är så mycket annat som driver kostnaden. Alla system måste vara dubbla, det gäller signalvägarna, bromsarna, elsystemet, styrningen och tillgängligheten i datorerna.
En avgörande skillnad mellan självkörning och förarstöd är hur data från sensorerna hanteras.
– I ADAS har vi ganska mycket förbehandling i sensorerna, vi får objekt från dem. I självkörning har vi mycket högre krav. Vi tar in det vi får från sensorerna och gör fusionen på lägre nivå.
 Denna artikel har tidigare publicerats i magasinet Elektroniktidningen. För dig som jobbar i den svenska elektronikbranschen är Elektroniktidningen gratis att prenumerera på – våra annonsörer betalar kostnaden. Denna artikel har tidigare publicerats i magasinet Elektroniktidningen. För dig som jobbar i den svenska elektronikbranschen är Elektroniktidningen gratis att prenumerera på – våra annonsörer betalar kostnaden.Här tecknar du en prenumeration (länk). |
En konsekvens är att självkörning behöver en mycket kraftfullare centralenhet. Dessutom ökar kraven på databussarna som kopplar ihop de olika delarna. Idag används Can och Flexray men trenden går mot Ethernet även om även den ser ut att vara i klenaste laget för självkörning.
Säkerheten handlar också om att bilen inte får kunna hackas, Här vilar ansvaret tungt på biltillverkaren som sätter ihop den kompletta produkten.
– En del av ansvaret faller dock på oss, vi behöver se till att våra produkter är säkra.
Hittills finns två namn på den officiella kundlistan. Förutom Volvo – som äger hälften av bolaget – ska även systerbolaget Geely använda Zenuitys produkter.
Även om fokus ligger på personbilar så är tekniken möjlig att använda i lastbilar, bussar och andra fordon. Funktionen där uppkopplade fordon delar information om vägen är bara att kopiera rätt av medan andra funktioner kräver anpassningar eftersom sensorerna sitter på lite andra positioner i större fordon som dessutom har andra köregenskaper.
– Vi fokuserar på bilar men pratar med andra tillverkare också.