






 Idag är mycket av det avancerade förarstödet förbehållet dyrare bilmodeller. Genom att standardisera ett antal funktioner i bilens hjärna – den systemkrets som fattar besluten – blir utvecklingsjobbet enklare plus att systemen blir skalbara. Den som ska göra jobbet är organisationen AVCC – Autonomous Vehicle Computing Consortium.
Idag är mycket av det avancerade förarstödet förbehållet dyrare bilmodeller. Genom att standardisera ett antal funktioner i bilens hjärna – den systemkrets som fattar besluten – blir utvecklingsjobbet enklare plus att systemen blir skalbara. Den som ska göra jobbet är organisationen AVCC – Autonomous Vehicle Computing Consortium.
– Det handlar inte om att skriva en standard utan skapa konsensus hos olika aktörer genom att få med så många som möjligt.
Det säger Giuseppe Rosso som till vardags arbetar på Veoneers dotterbolag Arriver som fokuserar på mjukvara. Två dagar för jul utsågs han till ordförande i AVCC.
Arkitekturen går dessutom från att vara distribuerad med många styrenheter utspridda i fordonen till allt mer centraliserade lösningar.
 – Det kan vara sex zoner med en dator för varje hörn plus en fram och en bak.
– Det kan vara sex zoner med en dator för varje hörn plus en fram och en bak.
Till varje dator är olika sensorer och ställdon anslutna, plus att det kan finns två eller tre överordnade datorer.
Trenden mot centralisering hänger samman med att elektronikinnehållet ökar snabbt, idag kan det i extremfallen utgöra mer än hälften av totalkostnaden för en bil. Att då ha en massa decentraliserade enheter blir komplext och leder till högre utvecklingskostnader liksom risken för att det smyger sig in fel som inte upptäcks i labben.
Samtidigt påverkar utvecklingen underleverantörskedjan och företagens roller. Tidigare har företag som Veoneer, Denso, Bosch och Continental – även kallade Tier 1 – satt ihop paket med datordelar, sensorer och mjukvara som de sedan erbjudit fordonstillverkarna, OEM:erna. Den ordningen är på väg att förändras.
– Tillverkarna av systemkretsar och mjukvara går direkt till OEM:en, sen får Tier 1 integrera delarna. När affärsmodellen ändras är det nödvändigt med standardisering, säger Giuseppe Rosso.
Det är här som AVCC kommer in. Integrationsarbetet som Veoneer och dess konkurrenter ska göra underlättas om systemkretsar och mjukvara är standardiserade och modulära så att de lätt går att pussla ihop enligt fordonstillverkarnas önskemål.
Mjukvaran för mediaspelaren kan exempelvis komma från en leverantör medan en annan står för filhållningen och en tredje för övervakningen av föraren plus att elektroniken och sensorerna kommer från ett fjärde och femte företag.
Standardisering skulle ge både skalbarhet – enklare bilmodeller har färre funktioner medan lyxvarianterna har allt – men också möjlighet att i större utsträckning återanvända samma lösning för olika biltillverkare.
AVCC siktar i första skedet in sig på vissa delar i det pussel som behövs för skapa ett förarstöd. Det handlar om datordelarna – systemkretsarna – i kombination med mjukvaran och kamerorna.
Organisationen grundades så sent som i juli 2019 av Toyota, GM, Denso, Bosch, Continental och Arm. Idag har antalet medlemmar växt till 22 stycken. I mitten av april kom de första resultaten.
– Vi är fortfarande i uppstartsfasen. Vi fokuserar på är att bygga konsensus runt datorsystemet. Men vi är inte ett standardiseringsorgan som ISO utan ett konsortium, säger säger Giuseppe Rosso.
Målet är att ta fram en grundläggande specifikation – en lägsta nivå – för vad de olika blocken i fordonets systemkrets ska göra, men också skapa tester och riktlinjer för hur man integrerar systemkrets, sensorer och mjukvara.
– Det handlar inte om att specificera prestanda, det sker genom konkurrens.
Nvidia, Renesas och Qualcomm är tre av de halvledarbolag som satsar hårt på att ta fram systemkretsar för förarstöd men även självkörning.
AVCC har arbetat med utgångspunkt från förmåga till helt automatiserad körning, men visar tydligt hur man skalar ned arkitekturen till förarstöd, det som brukar kallas ADAS.
– Världen har ändrats, självkörning har minskat medan den större delen av marknaden är ADAS.
Det handlar om SAE-nivåerna 1, 2 och 2+ där föraren fortfarande har det formella ansvaret men där bilen stöttar på olika sätt, som filhållning, upptäcka objekt i döda vinkeln, nödbromsning och andra liknande funktioner som minskar risken för att råka ut för en olycka.
En av arbetsgrupperna tittar på kamerorna, med det handlar inte om att försöka standardisera dem.
– Det finns inte en standardarkitektur, alla OEM:er gör olika beroende på vad de vill ha för funktioner.
Exempelvis kan man ha fem kameror och en radar eller fyra radar och en kamera. Dessutom finns en spännvidd inom varje kategori av sensorer vad gäller räckvidd, upplösning, synfält plus att vissa tillämpningar kräver lidar.
AVCC börjar som sagt på en hög nivå med blocken i systemkretsen men det är inget som säger att det stannar där.
– Det kan finnas en poäng med att standardisera gränssnittet till sensorerna och vilken prestanda de ska ha men idag sköts det genom konkurrens på marknaden, säger Giuseppe Rosso.
Ytterligare två arbetsgrupper som håller på att formeras ska titta på cybersäkerhet och mjukvaran.
– Gruppen för cybersäkerhet ska börja med att inventera dagens landskap för att ta reda på vilka luckor det finns.
 Artikeln är tidigare publicerad i magasinet Elektroniktidningen. Artikeln är tidigare publicerad i magasinet Elektroniktidningen.Prenumerera kostnadsfritt! |
De ska presentera de första resultaten under tredje kvartalet.
– Tanken med den andra arbetsgruppen är att titta på vad som finns tillgängligt idag, som Autosar.
Planen är att försöka definiera ett standardgränssnitt så att det blir enklare att integrera mjukvarukomponenter från olika leverantörer.
Andra intressanta områden är de neurala nätverk som används för AI liksom hur bilen kommunicerar med omgivningen och med molnet.
|
De två första dokument som AVCC publicerade 13 april:
Functional Guide to Image Signal Processing: Includes Autonomous and Assisted Vehicle Driving Use Cases and Workloads
Conceptual Architecture for Automated and Assisted Driving Systems: 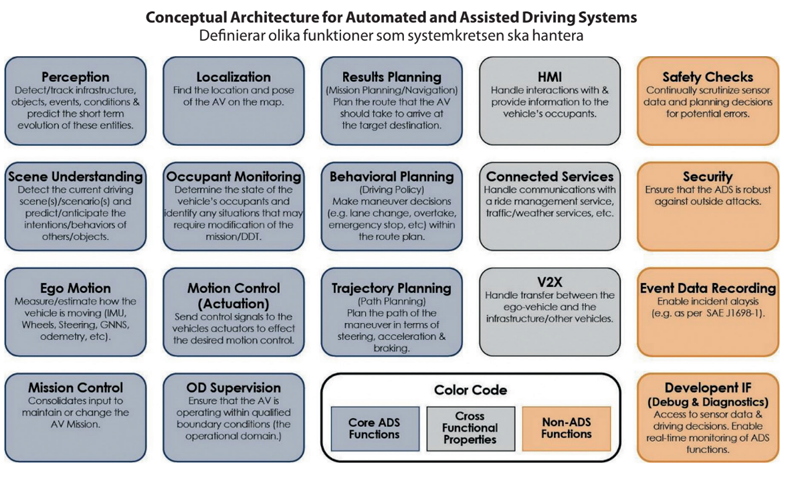 |































