







 Dubbla Canbussar och stöd för fordonsstandarden ISO 26262 gör det tydligt villken marknad Nvidia siktar på med sin nya 16 nm-processor Parker.
Dubbla Canbussar och stöd för fordonsstandarden ISO 26262 gör det tydligt villken marknad Nvidia siktar på med sin nya 16 nm-processor Parker.
Du har sett Parker förut. Det sitter två stycken i Nvidiakortet PX2 som ligger i bakluckan på de Volvobilar som ska köra med autopilot i Göteborg och andra världsmetropoler med start nästa år. Vid sidan av de två Tegra-gpu-chipen på PX2 är Parkerchipen ansvariga för att ta emot och analysera sensordata för att realisera Volvons autopilot.
Dessutom stöder Parkerchipen virtualisering och tror sig om att samtidigt med autopiloten också orka driva både kupéunderhållning, ytterligare ADAS-system och instrumentkluster.
Volvo är inte ensam – 80 biltillverkare använder PX2 för att utveckla autonoma funktioner i fordon.
Nu har Nvidia presenterat data om Parker. Det skedde på konferensen Hot Chips i Cupertino i måndags.
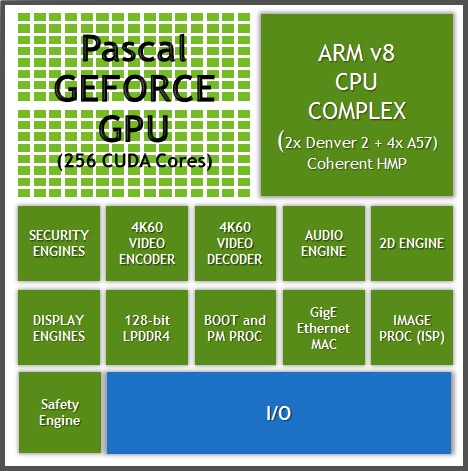
På cpu-sidan i denna systemkrets hittar vi en cachekoherent kompott av mäktiga 64-bitarskärnor. Fyra stycken Arm Cortex A57:or men dessutom två exemplar av Nvidias egen sjufiliga 64-bitare Denver 2.0. De sex delar på 2 + 2 Mbyte L2-cache.
Merparten av gpu-kraften i PX2-kortet levereras av de två Tegrachipen, men också Parker har en egen liten gpu i samma arkitektur, Pascal, med 256 Cuda-kärnor. De kan användas för grafik, men också för att göra inferenser enligt AI-algoritmen Deep learning, och detta med en prestanda på 1,4 teraflops.
Parker-chipet innehåller kryptoblock, 4K-video-codec, ljudmotor, 2D-grafik, skärmdrivare, 128-bitars LPDDR4, Gigabit Ethernet-MAC och bildkärna.
Dessutom finns här ett block som Nvidia kallar ”safety engine”. Den kan detektera och hantera fel och använder lock-step-exekvering, det vill säga exekverar alla instruktioner två gånger parallellt och jämför utfallet.
Parker krypterar och dekrypterar både VP9 och H.265 i 4K i 60 bilder per sekund och driver upp till tre 4K-skärmar.
LPDDR4-stödet inkluderar felkorriering, ECC. IO-kärnan stöder dubbla Can-bussar.































