






 EMBEDDED AWARD Sätt fyra UWB-taggar på en robot, och stoppa en i fickan, så kan du få den att följa efter dig med en precision på 20 centimeter. Tekniken förlänade två Chalmersstudenter ett delat förstapris i årets upplagat av den svenska elektronikutmärkelsen Embedded Award.
EMBEDDED AWARD Sätt fyra UWB-taggar på en robot, och stoppa en i fickan, så kan du få den att följa efter dig med en precision på 20 centimeter. Tekniken förlänade två Chalmersstudenter ett delat förstapris i årets upplagat av den svenska elektronikutmärkelsen Embedded Award.
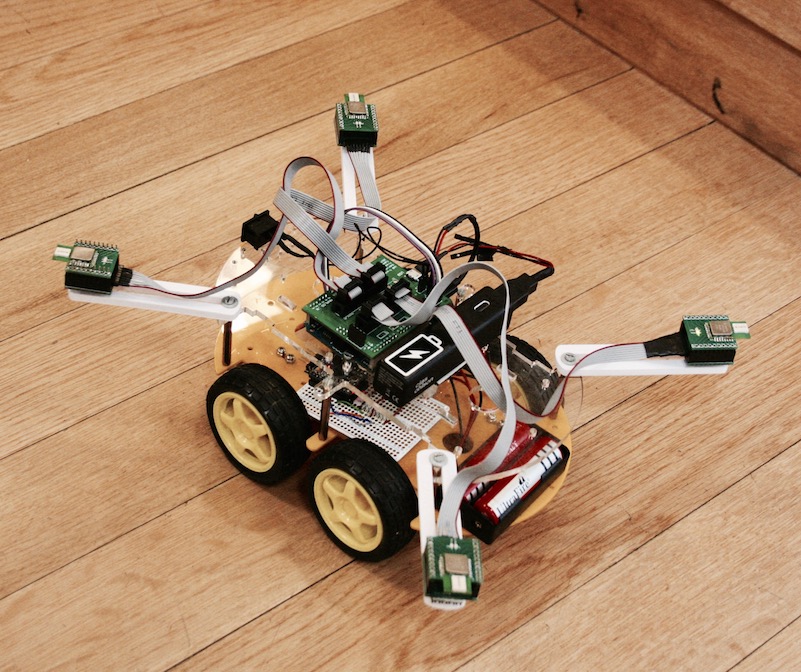
Gabriel Ortiz och hans studiekamrat Fredrik Treven har utvecklat en prototyp av en fyrhjulig följarrobot. Den rullar ivrigt efter ägaren över golvet.
Tillämpningar skulle kunna vara kundvagnar, självrullande resväskor på flygplatser, gräsklippare, packvagnar som rullar runt med en trupp soldater eller leksaker.
Att implementera lokalisering på det här sättet är en helt ny idé. En annan forskargrupp från Zürich hann tyvärr före med att presentera konceptet på konferens.
UWB-taggar till resonabelt pris – cirka 20 dollar styck från Decawave – är ett nytt fenomen, och en förklaring till att idén kommer just nu.
Följa John av det här slaget implementeras idag med kameror, stereokameror eller laserradar. Gabriel Ortiz räknar upp nackdelarna: objektet som följs måste hela tiden finnas i sikte och inom ett begränsat synfält. Det krävs vidare massor av beräkningskraft och algoritmerna för målföljning är komplexa. Och så är systemen är känsliga för störningar och exempelvis är dålig belysning är en utmaning.
En ultra wideband-tracker behöver bara göra lite signalanalys för att veta vart den ska gå. Och så behövs lite statistisk intelligens för att beräkna vilken position som är mest sannolik när två olika positioner matchar samma sensordata.
UWB-lösningen ger ett fel på två centimeter medan motsvarande teknik i Bluetooth skulle ge ett fel på en meter. Räckvidden är 10 meter i den prototypföljare som studenterna tagit fram, men den skulle kunna fungera upp till 100 meter.
Samma grundlösning fungerar dessutom för positionering.
 |
| Gabriel Ortiz |
– Sätt taggar på dina barn på lekplatsen och du kan enkelt hitta dem. Med en GPS-tagg får du inte alls samma noggrannhet, säger Gabriel Ortiz.
Om UWB-lösningen används för positionering blir felet cirka två decimeter.
Det finns ingen produkt i sikte för studenterna just nu. Gabriel Ortiz och Fredrik Treven har demonstrerat att konceptet fungerar i en prototyp med en Arduinohjärna, och mätt upp egenskaperna.
En skarp tracker skulle behöva kompletteras exempelvis med teknik för att undvika att köra in i hinder.
–Det kommer i nästa del av projektet.
Projektet har gjorts hos konsulten Cybercom.































