






 Umeåföretaget Algoryx ska hjälpa Japan att utveckla simulatorer för röjningsrobotar. Företagets så kallade fysikmotor ska göra robotarnas beteende mer realistiskt vare sig de kryper, går, simmar eller krälar.
Umeåföretaget Algoryx ska hjälpa Japan att utveckla simulatorer för röjningsrobotar. Företagets så kallade fysikmotor ska göra robotarnas beteende mer realistiskt vare sig de kryper, går, simmar eller krälar.
Det är Japans regering och forskningsorganisationen AIST (National Institute of Advanced Science and Technology) som gett kontraktet till Algoryx och dess japanska partner och återförsäljare VMC.
AIST har utvecklat en robotsimulator kallad Chorenoid. Den innehåller redan en så kallad fysikmotor, men efter en uppgradering med Algoryx programvara AGX Dynamics kommer den att bete sig mer realistiskt och få högre prestanda.
Begreppet fysikmotor används inom spelindustrin. Men i den världen optimeras motorerna för spelglädje medan det viktiga här är fysisk korrekthet vad gäller exempelvis krafter och energikonservering.
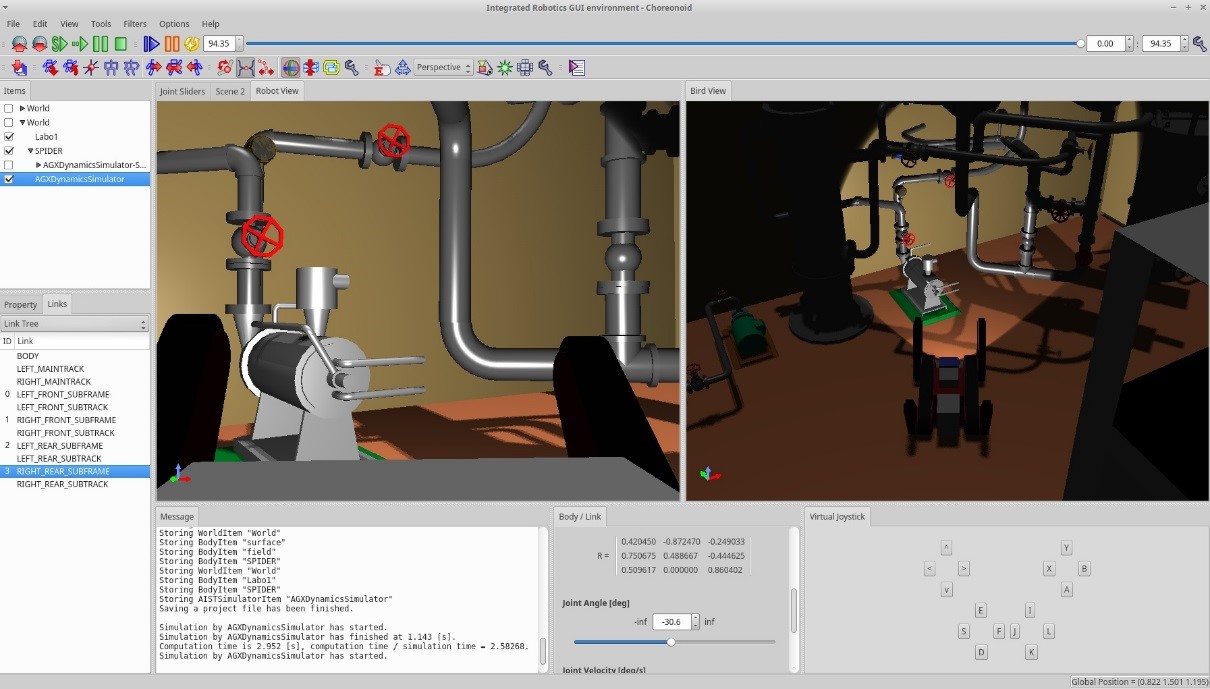 |
| Simulerad robot inspekterar rör i programmet Chorenoid med Algoryx fysikmotor påslagen. Renderad ur robotens perspektiv respektive uppifrån. Joysticken längst ner till höger. Klicka för större bild! |
Projektet handlar om att utveckla robotar som sätts in vid katastrofer för att till exempel rädda människor, bekämpa eld, röja, krossa väggar, bryta sig igenom dörrar, utföra transport och styra apparater.
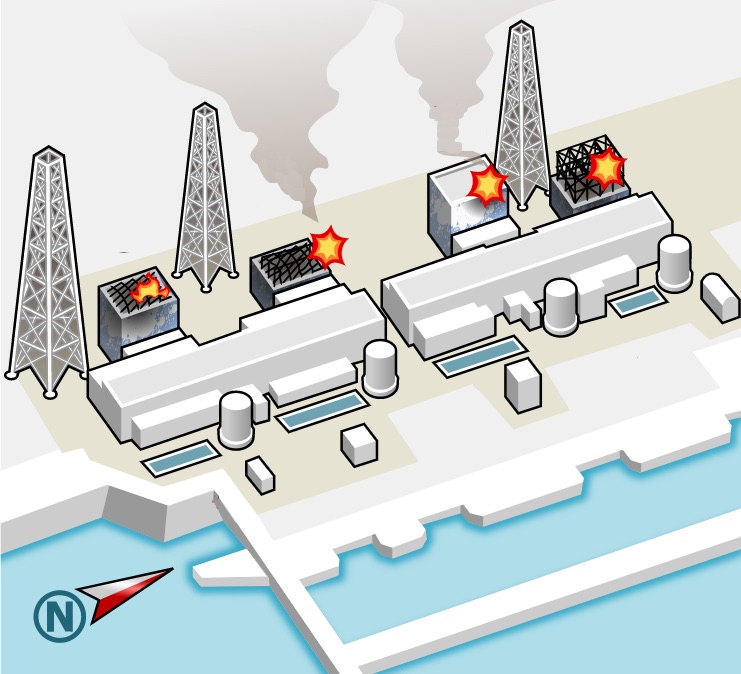
Initiativet kom efter olyckan vid en kärnkraftsreaktor i Fukushima år 2011. Möjligheten att städa upp efter olyckan begränsas av att det är livsfarligt att vistas i ruinerna.
Robotar är ett alternativ. I Fukushima byggs nu en testbana där robotar från japanska företag och forskningsinstitut ska krypa, kräla, simma eller trampa omkring på två eller flera ben.
Robotarna ska dessutom testas och utvecklas i en simulerad miljö kallad Chorenoid – en programvara utvecklad på AIST. Det är den som Algoryx nu uppgraderar med bättre fysik.
Algoryx är ett av de världsledande företagen inom fysiksimulering och Algoryx vd Kenneth Bodin är inte blygsam när Elektroniktidningen frågar om skillnaden mellan AGX och AIST:s egen fysikmotor.
 Kenneth Bodin |
– Vi har lagt sisådär 130 manår utveckling på AGX, plus en massa akademisk forskning, så det är inte lätt för någon doktorand eller liten forskargrupp att konkurrera.
För det första är AGX optimerad för de specifika ekvationer som används och därmed ”mycket” snabbare än generella ekvationslösare.
Dessutom har AGX bredare funktionalitet än konkurrenterna med stöd för bland annat stelkroppsfysik, hydrodynamik, hydraulik, kabel och, fordonsdynamik.
Prestandan är på den nivån att simuleringarna ofta kan köras i full realtid, det vill säga i samma hastighet som de verkliga robotarna rör sig.
Kenneth Bodin räknar upp fler avseenden där Algoryx sticker ut i kvalitet.
– Vi hanterar stora masskillnader bra, till exempel en kran som lyfter tiotusentals ton, men där ett wiresegment kanske bara väger några kilon. Det ger särskilt bra egenskaper för kontaktmekanik, till exempel en robot som griper tag i och håller något.
Förutom normala tidsförlopp på millisekunder kan AGX hantera både snabba förlopp på mikrosekunder och långsamma förlopp på timmar.
AGX är förberett för att integreras med 3D-grafik.
– Och så är det bra på att hantera loopade system, det vill säga mekaniska system som är cirkulära, och ger stora problem i många ekvationslösare.
Illustration av Fukushina-olyckan: Wikimedia Commons User Sodakan,
































