






Innan de autonoma maskinerna rullar ner i en fysisk gruva har deras digitala tvillingar redan brutit malm i en simulerad värld. Idén utforskas i ett projekt på Luleå tekniska universitet.
Projektets mål är att göra gruvdrift säkrare, smartare och effektivare med hjälp av självkörande gruvmaskiner, särskilt för större djup. Autonomin gör det möjligt med upplägg som skulle innebära för stora risker för människor.
Projektet bemannas av Robotik- och AI-teamet vid Luleå tekniska universitet. En nyckelidé hämtas från Umeåbolaget Algoryx som är specialist på fysisk simulering: att utveckla strategi och logistik i en digital gruvtvilling.
Majoriteten av de nya malmfyndigheterna som upptäcks för bland annat sällsynta jordartsmetaller till elektrifieringen, befinner sig långt ner i marken, 300 meter från jordens yta eller mer. Detta ökar riskerna. Och kostnaderna ökar ännu om arbetsmiljön ska kunna hållas acceptabel.
Dagens automatiserade gruvfordon och maskiner är varken bra på att läsa av sin omgivning, eller att planera körrutter och rörelser på egen hand. Därför ska projektet utveckla ny sensorteknik och AI-styrning.
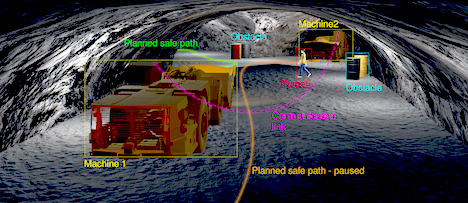
I ett första steg bygger man upp realistiska digitala tvillingar av gruvmaskiner och omgivningar i en fysikbaserad simuleringsmiljö som tillhandahålls av Algoryx.
När de virtuella gruvmaskinerna klarar sina virtuella uppdrag kommer de lyfta av sig cyberhjälmarna och rulla ner i en fysisk testgruva.
 |
| George Nikolakopoulos |
– Vi gör så mycket mer än autonomi, i grund och botten accelererar vi maskiner till en ny teknologinivå, säger projektledaren professor George Nikolakopoulos som har lång forskningserfarenhet av robotar i gruvor och andra ostrukturerade och krävande miljöer – inklusive främmande planeter.
– Den övergripande kvaliteten på svenska gruvor, effektivitet och säkerhet kommer att vara oöverträffad.
Projektet heter Renam och ska pågå till slutet av 2025. Det finansieras av Vinnova. Projektparters är Epiroc och Algoryx och koordinator är Luleå tekniska universitet.
































