






 REPORTAGE Om en fjärrstyrd robot verkligen vore helt fjärrstyrd, så skulle den inte fungera. Det skulle bli för mycket detaljer att tänka på för operatören. Den måste hålla balansen själv – även ”socialt” – och låta operatören fokusera på sina egentliga uppgifter. Elektroniktidningen talar med socialrobotforskaren Amy Loutfi.
REPORTAGE Om en fjärrstyrd robot verkligen vore helt fjärrstyrd, så skulle den inte fungera. Det skulle bli för mycket detaljer att tänka på för operatören. Den måste hålla balansen själv – även ”socialt” – och låta operatören fokusera på sina egentliga uppgifter. Elektroniktidningen talar med socialrobotforskaren Amy Loutfi.
|
|
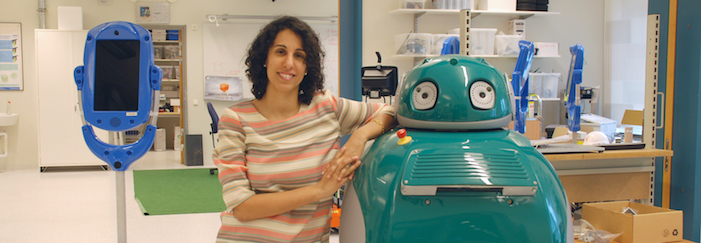
Inte bara kroppskontrollen behöver vara automatisk i en telerobot, utan även en del av den sociala kompetensen. Detta enligt Amy Loutfi, som är professor på Institutionen för naturvetenskap och teknik på Örebro universitet.
Telenärvaro innebär att en operatör fjärrstyr en robot på distans. I teorin är den telestyrda roboten bara ett tomt skal och operatörens förlängda kropp. I praktiken visar det sig vara en bra idé att låta roboten ha en viss grad av självständighet.
Inklusive automatiserad social kompetens.
– Det är svårt att både styra en robot och att ha ett samtal samtidigt, säger Amy Loutfi.
Hon forskar på de sociala aspekterna av telenärvaro.
Om du i en science fictionframtid närvarar på en mässa i en fjärrstyrd robotkropp, som glider runt i en folkmassa, så behöver den kunna balansera och ha egna snabba reflexer för att inte krocka med människor.
Den behöver också förstå de tysta regler som gäller när människor förhandlar med varandra om fysiskt utrymme – hur man signalerar på vilken sida man ska passera varandra vid ett möte och vilket avstånd som känns bekvämt att hålla till varandra.
En del regler är kulturberoende. I Japan promenerar människor fram till varandra på ett annat sätt i än i Europa. Här finns ett stort spännande forskningsfält: hur gör människor för att dela på samma rumsliga utrymme, och hur kan robotar anpassa sig?
Det handlar om subtila beteenden som vi inte ens tänker på. När människor står i en ring under en fikapaus står vi en viss formation. Roboten kan inte ställa sig mitt i ringen, eller utanför den, om operatören vill kunna vara en naturlig del av gruppen.
Om roboten själv kan avgöra var alla är, och hur formationen ser ut, så kan den hjälpa till att placera sig lämpligt. För om operatören själv måste ägna sig åt detta, så stör det interaktionen.
Det har forskarna sett i experiment där operatören haft i uppdrag att manövrera sig från punkt till punkt.
I ett museum när en grupp tittar på en tavla är formeringen en annan. I en promenad ytterligare en annan, och dessutom dynamisk. Av samma skäl som den fjärrstyrda roboten behöver håller balansen själv, finns ett behov av att den upprätthåller sociala balanser av det här slaget.
Det finns mer att studera i social telenärvaro. Exempelvis reaktionerna och beteendet hos de människor som teleroboten interagerar med.
Det visar sig att folk kan bete sig som de aldrig skulle göra mot en närvarande människa. De kan fly undan eller ignorera teleroboten på ett sätt som skulle vara socialt oacceptabelt.
– Det här händer även när de är fullt medvetna om att det är en människa som styr roboten.
Vad skulle du säga om du plötsligt blev upplockad och ivägburen? Det har hänt Amy Loutfi i en telerobot.
– Som operatör känns det väldigt närgånget. Man är van vid att ha egen kontroll över sin kropp.
Kändes det som ett övergrepp?
 Denna artikel har tidigare publicerats i magasinet Elektroniktidningen. För dig som jobbar i den svenska elektronikbranschen är Elektroniktidningen gratis att prenumerera på – våra annonsörer betalar kostnaden. Denna artikel har tidigare publicerats i magasinet Elektroniktidningen. För dig som jobbar i den svenska elektronikbranschen är Elektroniktidningen gratis att prenumerera på – våra annonsörer betalar kostnaden.Här ansöker du om prenumeration (länk). |
– Det är kanske ett för starkt ord. Men det gick över en gräns.
Telenärvaro är en märklig upplevelse. Operatören känner att kroppen delvis verkligen flyttar över och smälter samman med robotens kropp.
Också detta är något som forskarna är intresserade av och försöker mäta – hur mycket ”förkroppsligande” som operatören känner i olika robotar och situationer.
Framtida tillämpningar för social telenärvaro kan finnas exempelvis inom äldrevård och omsorg. Men det är ingen generell lösning, utan passar bara under specifika omständigheter, som ett plötsligt akutbesök eller arbetsmiljöbesök där operatören behöver kunna ta sig runt på plats.
En annan tillämning är att barn som inte fysiskt kan närvara i skolan kan få delta i aktiviteter med viss frihet, via telenärvaro.
– Det är en tillämpning som vi vill undersöka mer.
Grunden för att telenärvaro ska fungera är en bra nätuppkoppling. Styrgränssnittet ska också ha en låg kognitiv belastning – robotar med enklare styrmöjligheter kan ge högre kvalitet på interaktionen.
– Jag har sett exempel där gränssnittet är så komplicerat att det är väldigt svårt att styra. Säg att robotkroppen kan vrida huvudet åt alla håll och höjas och sänkas och en massa olika saker samtidigt – man kanske inte har förutsättningar att göra allt det där samtidigt som man pratar.
Lösningen på dilemmat kan vara den automatisering av social interaktion som Loutfi jobbar med – att exempelvis låta teleroboten själv kunna vända sig mot ansiktet på den som operatören pratar med.
En av de tyngre tekniska frågorna inom telenärvaro är helt enkelt personsäkerhet. Roboten får inte välta och den måste ha en säker reaktion på att uppkopplingen försvinner.
Dagens robotar har begränsade motoriska färdigheter, så mycket av experimenterandet sker i simulatorer i virtual reality.
Fysiska robotar som Amy Loutfis forskargrupp arbetar med är bland annat den franska roboten Pepper och den svenska Giraff. Deras motorik är mycket begränsad. De kan i princip bara förflytta sig.
– Det skulle vara mycket intressant att introducera mer komplex motorik. Men det skulle också vara att öppna ytterligare en Pandoras ask kring säkerhet.
De franska robotarna är humanoida. Den svenska inte.
– Frågan är hur kroppen ska se ut? Räcker det att prata med en svart låda? Eller är det viktigt att den kan visa känslor och till och med ser ut som vi?
Det är inte alls säkert att kroppen behövs. Enligt studier blir till och med en robotgräsklippare en social enhet, med namn och allt, trots total avsaknad av social intelligens.
– Något som är ironiskt är att vi egentligen är tekniker. Men genom att gräva i tekniken lär vi oss mer om människor än om teknik.































