






 REPORTAGE Det svenska robothuvudet Furhat vill bli en pc för social robotik – ladda den med appar för att ge den olika personligheter.
REPORTAGE Det svenska robothuvudet Furhat vill bli en pc för social robotik – ladda den med appar för att ge den olika personligheter.
Svenska Furhat Robotics har fått en investering på 2,5 miljoner dollar. De ska användas för att höja robothuvudets sociala kompetens och för att marknadsföra robothuvudet bredare.
De tidigare kunderna har varit forskare på företag och universitet. Roboten används ännu inte i större kommersiell skala.
 |
| Gabriel Skantze |
– För att göra det behöver vi utveckla plattformen ytterligare. Det återstår problem att lösa, säger Gabriel Skantze, docent på Institutionen för tal musik och hörsel på KTH.
Han och kollegorna utvecklade huvudet för egen forskning.
– Men när vi visade upp den ville andra veta var de kunde få tag på den. Varför inte, tänkte vi.
|
|
Ett företag grundades år 2014 och fick snabbt kunder. Kollegorna inom forskning på sociala robotar hade fram till dess varit hänvisade till att söka upp komponenter på egen hand för att sedan hacka ihop fungerande experimentuppställningar.
– Vi skapade en helhet av mjukvara och hårdvara i ett paket där allting fungerar ihop.
Också företag är kunder, för forskning och utveckling. En av dem är Disney Research, som har mycket forskning om sociala robotar.
Nu hopppas Furhat Robotics att roboten ska bli en standardplattform för andra att bygga tillämpningar på. Lite som en pc eller en appstore för sociala robotar, där program laddas för att ge roboten olika personligheter för olika experiment och tillämpningar.
– Vi skulle gärna se att andra företag utvecklar produkter med Furhat som plattform. Exempelvis en receptionist, eller en robot som står någonstans och svarar på frågor, eller fungerar som extralärare på skolor.
Vanliga hushåll är ännu inte målgrupp för roboten. Prisklassen är för hög.
– Det är kanske ett framtidsscenario, men vi är inte där ännu.
Men framtida generationer av virtuella assistenter som Siri, Alexa, Assistant och Cortana kan komma att ha en form och funktion som liknar Furhat.
Poängen med Furhat, det som den är optimerad för, är talad interaktion.
Den har ett animerat ansikte. Det är i sig inte är något nytt, det kan man sätta på en vanlig bildskärm. Men Furhats ansikte sitter på ett tredimensionellt huvud – tänk skyltdocka. Den kan röra på huvudet, och därmed skapa ögonkontakt.
Räcker den lilla motoriken för att kvalificera den som ”robot”?
– Det finns i och för sig kriterier som säger att det inte gör det. Men i våra ögon är den det.
 Denna artikel har tidigare publicerats i magasinet Elektroniktidningen. För dig som jobbar i den svenska elektronikbranschen är Elektroniktidningen gratis att prenumerera på – våra annonsörer betalar kostnaden. Denna artikel har tidigare publicerats i magasinet Elektroniktidningen. För dig som jobbar i den svenska elektronikbranschen är Elektroniktidningen gratis att prenumerera på – våra annonsörer betalar kostnaden.Här ansöker du om prenumeration (länk). |
– Den får en fysisk plats i rummet som en animerad agent på en skärm inte har. Vi upptäckte tidigt att det gjorde en enorm skillnad.
Ett ansikte på en skärm har ögonkontakt med alla och ingen. Som en nyhetsuppläsare. Det kallas Mona Lisa-effekten.
– Det fungerar inte interaktivt när man vill att den ska kunna vända sig till en specifik person.
Du ser att Furhat tittar på dig, och alla andra ser det också. Därmed blir flerpartssamtal möjliga. Den möjligheten fanns inte enkelt före Furhat.
– Effekten av att ”wow, han är i rummet!” är väldigt stark. Speciellt när man får ögonkontakt. Jag brukar jämföra med skillnaden mellan att prata via Skype, och att prata med någon som är i rummet.
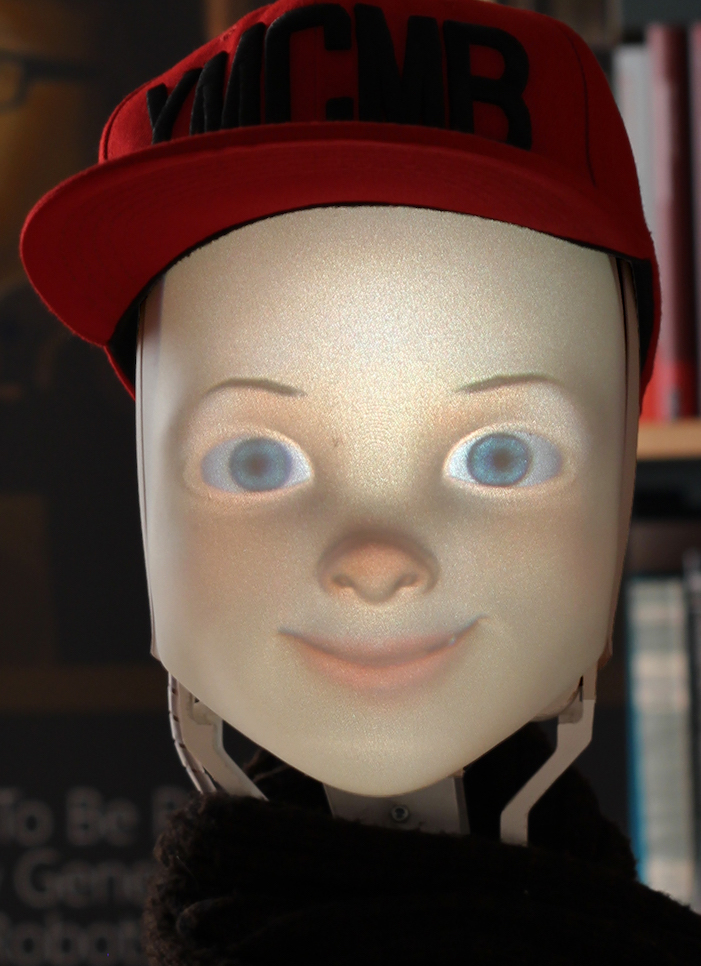
Furhats fysiska huvud har en magnetisk ansiktsmask som kan förvandla hen till man, kvinna, ung pojke, äldre kvinna. Eller ett sagoväsen eller en helt abstrakt form, kanske för en nöjespark.
Animerade ansiktsuttryck projiceras inifrån. Detta räcker för att ge en stark illusion av att huvudet exempelvis höjer ögonbrynen eller rör på ögonen.
Att fysiskt manipulera ett gummiansikte för att växla ansiktsuttryck vore ett alternativ och är en tänkbar framtid för Furhat. Men idag är det en svår utmaning att få att se bra ut.
Att projicera bilden kräver viss ingenjörskonst för att inte blockera optiken. I övrigt är hårdvaran standardkomponenter.
Huvudet filmar omgivningen med hjälp av djupkameror från Microsoft och Intel. Utöver video ger detta data om avståndet till personerna, och om deras huvudriktning. Därmed vet roboten hur den ska vrida på nacken för att få ögonkontakt.
Furhat kan endast i begränsad omfattning se folks ansiktsuttryck. Och den ser inte vart folk tittar. Det skulle kräva en mer avancerad utrustning än Furhats kamera.
– Huvudriktningen vilket ger viss information. Men man vill egentligen se vart blicken går.
– Om två personer står framför Furhat och tittar på varandra är det inte den de adresserar. Men när de vänder sig mot roboten ska roboten känna det.
Gabriel Skantze är hemlighetsfull om hur företaget utvecklar huvudet, men en förbättrad omvärldsuppfattning av det här slaget skulle roboten skulle kunna ha nytta av – en lärarrobot vill till exempel veta om eleven ser förvånad eller osäker ut.
Detta skulle dels kräva bättre sensorer och dels bättre mjukvara för tolkning av ansiktsuttryck.
En annan utmaning är att lyssna och prata samtidigt. Det sker med hjälp av ekosläckning. AI i all ära, men mikrofonteknik är ett av de stora problemen, med sociala robotar i museum och andra bullermiljöer.
Att förstå naturligt språk kräver fortsatt utveckling. Det är redan svårt i sig, och en socialrobot lägger på ytterligare dimensioner. För det första att kunna föra ett kontinuerligt samtal med följdfrågor, där personliga assistenter som Siri idag är atomära med en fråga och ett svar.
För det andra att integrera kroppsspråk bland de talade orden i samtalet, i form av pekande, gester och blickar.
Att ge Furhat mer motorik är däremot inte en prioritet idag. Här finns en skillnad mot en industrirobot, som behöver armar för att kunna lyfta och manipulera. Armar på en socialrobot är till för att peka och gestikulera.
ABB-industriroboten Yumi har armar, men inget huvud. De kanske kan kombineras? Då skulle man kunna prata med Yumi som komplement till att man instruerar den genom att dra i dess armar.
Diskussioner har förts med ABB, och det finns intresse, men ännu inget konkret projekt.
Yumikonkurrenten Baxter har ett ansikte på skärm men det används inte för talad interaktion.
Furhats nuvarande färdighet att röra på huvudet, är det som företaget främst putsar vidare på.
– Vi jobbar ständigt på att få den se mer naturlig ut och röra sig mer naturligt.
Så kallade mikrorörelser är outvecklade – ingen människa sitter blick stilla, utan vi byter ansiktstryck och gör nackrörelser.
De franska robotarna Nao och senare Pepper är konkurrenter i att de är populära bland socialrobotforskare. De har till skillnad från Furhat armar, som används kommunikativt. Däremot har de inga ansiktsuttryck.
– Det är ganska vanligt även bland sociala robotar att de är ganska uttryckslösa. Vi tycker delvis att man förbiser hur viktigt ansiktet är och de subtila signaler man kan uttrycka med hjälp av ansiktet.
































